Case Studies 3-A & 3-B: iPhone/Compass Deluxe

Row, row, row your boat gently up/down the stream???
Purpose: This blog is created to help readers a) better understand electronic compass [smartphone or rangefinder] residual azimuth deviation errors b) quantify the errors, c) model the errors, d) compensate for [correct] the errors, and e) influence the app vendor to apply the correction method within the affected smartphone app. Basically, we need to know (accurately) whether to go up / down the stream (path) we are traveling on.
Background: (Case Study 3-A)
This post will present the test results of the iPhone/Compass Deluxe app operated at the Birmingham, AL test site (3-A) with a strong magnetic/electromagnetic field. Recall that a previous post in this series presented the test results of the Vectronix PLRF25C (with compass) operating in the Birmingham, AL test site with a strong magnetic/electromagnetic field.
The Birmingham, AL (3-A) test site is set in an urban environment with strong magnetic/electromagnetic influences including:
- An electric power distribution station for eight (8) townhomes
- At least eight operating heating/cooling (heat pump) units of 3 to 4 ton capacity – aligned North/South within 50 feet of the test site (East side)
- An active highway – aligned North/South within 150 feet of the test site (West side)

Note: The Picayune, MS test site (3-B) exists in a 20 acre cow pasture with minimal magnetic/electromagnetic influence (field). The cattle were curious (disruptive) about what was taking place in their pasture. Recall that the Picayune, MS test site is 264 miles southwest of the Birmingham, AL test site.

The three major issues at the forefront of these two test sites include:
- What is the impact (if any) of changing location (latitude change) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: The earth’s magnetic field strength changes with the geographic location of the observer.
- What is the impact (if any) of changing the operating environment (minimal magnetic/electromagnetic influence) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: Electronic compass results (azimuth readings) are impacted by environmental influences.
- What is the impact (if any) of not recalibrating the iPhone compass on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: The author was entirely willing to accept any error that may result from the decision not to recalibrate the device being tested – relying on the capabilities of the compensation method to correct the potential azimuth errors.
The Test Results (3-A)
The data collection equipment and procedures used at test site 3-A (Birmingham, AL) were identical to those used at test site 3-B (Picayune, MS). Also, these data collection procedures were the same as used for testing the compass accuracy of the Vectronix PLRF25C laser rangefinder – refer to an earlier post.
At both test sites, the reference direction (True North) was established using sun position – a correct, defendable, and independent reference direction.
- True North (reference direction) was established based on the sun position relative to each test site’s geographic location on the date/time of each test.
- The iPhone compass was set to indicate azimuths relative to True North.
Recall: The residual compass deviation error persists throughout the entire 360 degree range of measurement. The following iPhone/Compass Deluxe data table presents the collected azimuth data collected (yellow) and the associated azimuth deviation error (orange).
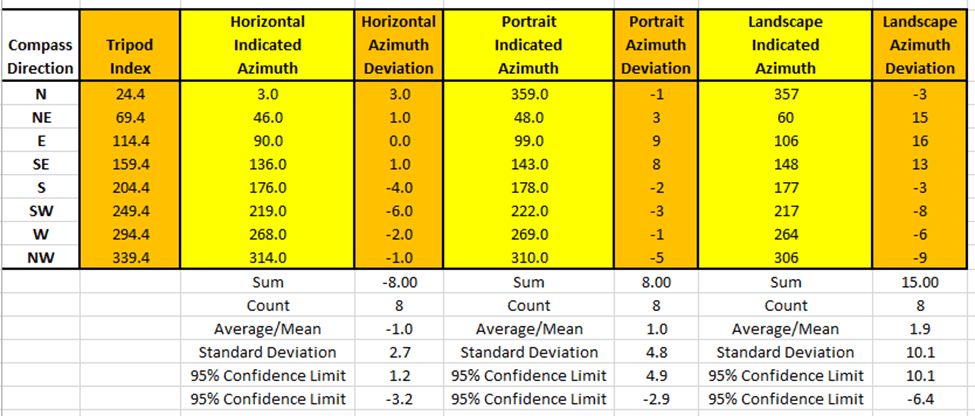
Notice that the data collection operations with the iPhone Compass Deluxe app were performed using three iPhone orientations – Horizontal, Portrait, and Landscape.
Note: As we proceeded with the each compass app (one after another), we noticed that each app appeared to have its own internal proprietary processing procedure to provide its “best” result for each azimuth reading – yet each app’s azimuth deviation (error) values were unique. Also, each compass app had its own quirks relative to the data collection process. For instance, due to the sensitivity of some apps, the data collection process was executed as follows: (using ONLY the following maneuvers)
- Slow, deliberate movements
- Clockwise rotations
- Left-to-right motions
- No jerky movements
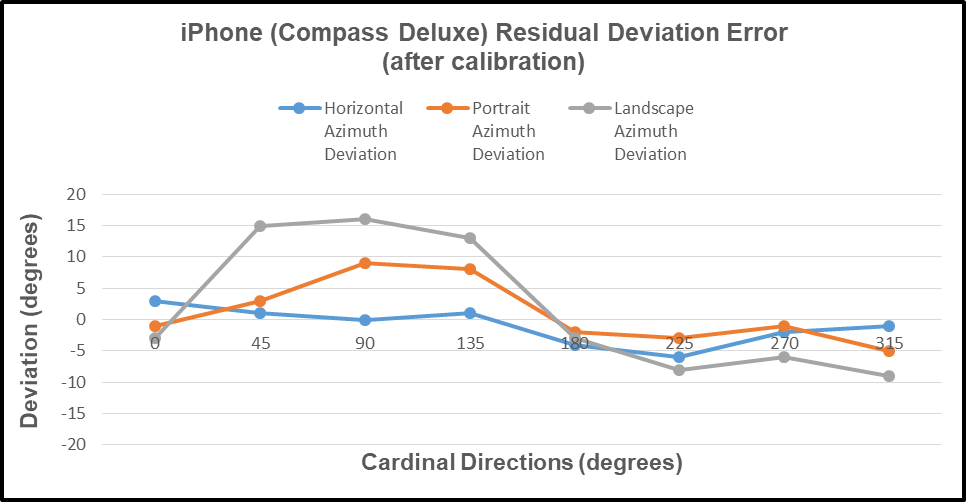
It is interesting to contrast (graphically) the residual compass azimuth deviation errors across multiple apps – to determine the consistency (or lack thereof) between apps being executed on a single smartphone.
- In general, the shapes of the iPhone/Compass Deluxe app (error) curves are relatively consistent with the shapes of other device/app curve combinations – the data was collected using the same iPhone, on the same day, and in the same location.
- Also, the relative positions of each (Horizontal, Portrait, and Landscape) curve were relatively consistent across other device/app combinations.
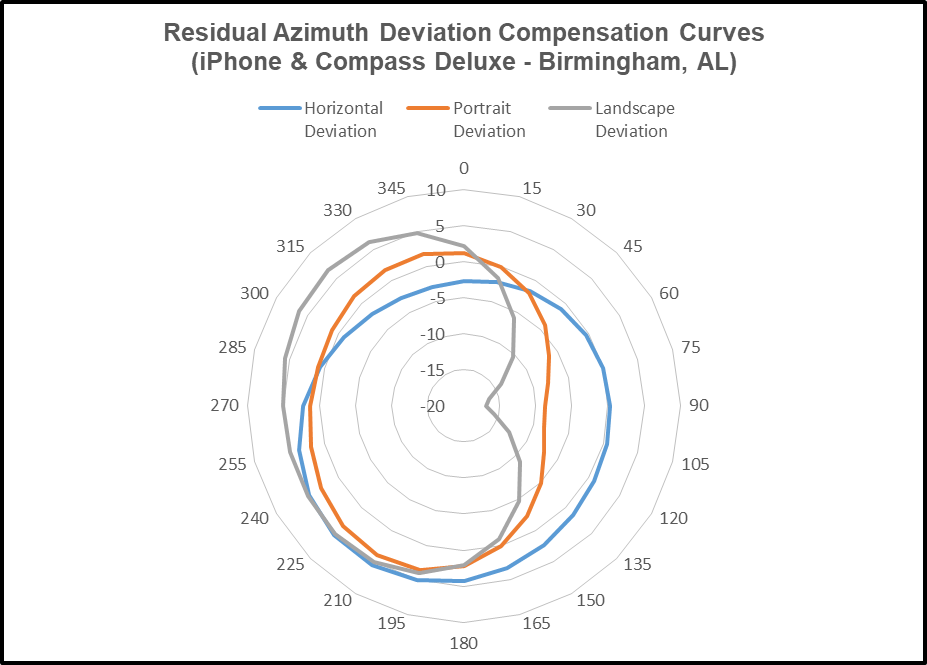
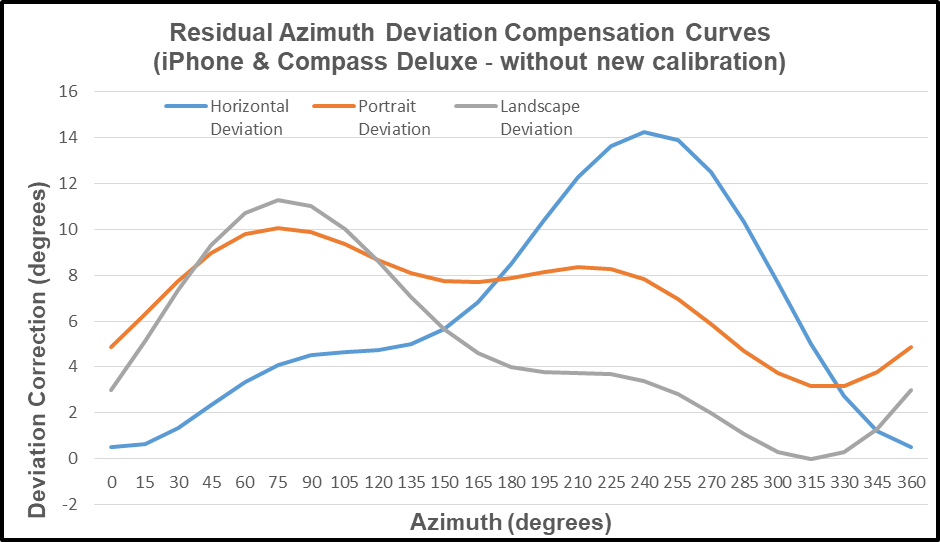
The “modeled” deviation compensation curves (derived from the residual deviation error) for the iPhone Compass Deluxe app are presented below. The modeled residual azimuth deviation compensation curves are presented in two different formats to allow the reader to seriously consider the deviation error – as measured throughout the full 360 degree range of measurement.

The compensated deviation errors (remaining azimuth errors after compensation) for the iPhone/Compass Deluxe app are depicted below. Again, two display formats are provided to strengthen the perceived impact of the compensation method.



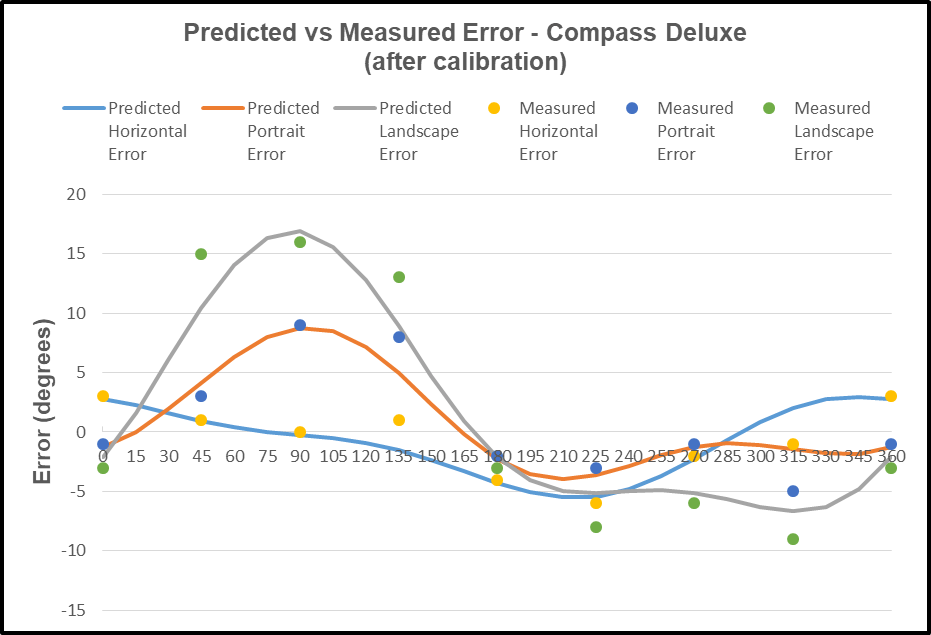
The predicted deviation errors for the iPhone Compass Deluxe app are depicted in the following chart. The predicted error curves are the negative of the deviation curves; and the compensation method proved quite effective.
Background: (Case Study 3-B)
The Picayune, MS test site (3-B) exists in a 20 acre cow pasture with minimal magnetic/electromagnetic influence (field). The cattle were curious (disruptive) about what was taking place in their pasture. Recall that the Picayune, MS test site is 264 miles southwest of the Birmingham, AL test site.

Recall that three major issues at the forefront of these tests include:
- What is the impact (if any) of changing location (latitude change) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: The earth’s magnetic field strength changes with the geographic location of the observer.
- What is the impact (if any) of changing the operating environment (minimal magnetic/electromagnetic influence) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: Electronic compass results (azimuth readings) are impacted by environmental influences.
- What is the impact (if any) of not recalibrating the iPhone compass on the effectiveness of the method for correcting residual compass (azimuth) deviation errors – for the iPhone/Compass Deluxe app? Fact: The author was entirely willing to accept any error that may result from the decision not to recalibrate the device being tested – relying on the capabilities of the compensation method to correct the potential azimuth errors.
The Test Results (3-B)
The data collection equipment and procedures used at test site A (Birmingham, AL) were identical to those used at test site B (Picayune, MS). Also, these data collection procedures were the same as used for testing the compass accuracy of the Vectronix PLRF25C laser rangefinder – refer to an earlier post.
At both test sites, the reference direction (True North) was established using sun position – a correct, defendable, and independent reference direction.
- True North (reference direction) was established based on the sun position relative to each test site’s geographic location on the date/time of each test.
- The iPhone compass was set to indicate azimuths relative to True North.
Recall: The residual compass deviation error persists throughout the entire 360 degree range of measurement. The following iPhone/Compass Deluxe data table presents the collected azimuth data collected (yellow) and the associated azimuth deviation error (orange).

Notice that the data collection operations with the iPhone/Compass Deluxe app were performed using three iPhone orientations – Horizontal, Portrait, and Landscape.
Again, it is interesting to contrast (graphically) the residual compass azimuth deviation errors across multiple apps – to determine the consistency (or lack thereof) between apps being executed on a single smartphone.

The “modeled” deviation compensation curves (derived from the residual deviation error) for the iPhone/Compass Deluxe app are presented below. The modeled residual azimuth deviation compensation curves are presented in two different formats to allow the reader to seriously consider the deviation error – as measured throughout the full 360 degree range of measurement.

The compensated deviation errors (remaining azimuth errors after compensation) for the iPhone/Compass Deluxe app are depicted below. Again, two display formats are provided to strengthen the perceived impact of the compensation method.


The predicted deviation errors for the iPhone/Compass Deluxe app are depicted in the following chart. The predicted error curves are the negative of the deviation curves; and the compensation method proved quite effective.

Now, we can assess the impact of the three issues identified in the “Background” portion of this post.
- What is the impact (if any) of changing location (latitude change) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors. Response: Minimal
- What is the impact (if any) of changing the operating environment (minimal magnetic/electromagnetic influence) on the effectiveness of the method for correcting residual compass (azimuth) deviation errors. Response: Minimal
- What is the impact (if any) of not recalibrating the rangefinder compass on the effectiveness of the method for correcting residual compass (azimuth) deviation errors. Response: Minimal
Recall that the measured residual deviation (azimuth) errors were (quite adequately) compensated in each test.
In the upcoming blog posts, we will deal with the iPhone (with compass) and several more “compass” apps. The next compass app to be dealt with is the SpyGlass app. As with the tests of the Vectronix rangefinder, the same methods will be used to collect, analyze, and present the results.
The reader can recall that these blog posts represent a series of posts dealing with the subject of “Fixing Rangefinder & Smartphone Residual Compass (azimuth) Deviation Errors“. All the subsequent posts in this series will (are planned to) follow a similar format. To date, four posts (including this post) have been published:
- Fixing Rangefinder & Smartphone Residual Compass (azimuth) Deviation Errors – True North
- Fixing Rangefinder & Smartphone Residual Compass (azimuth) Deviation Errors – Vectronix PLRF25C Laser Rangefinder
- Fixing Rangefinder & Smartphone Residual Compass (azimuth) Deviation Errors – iPhone & Compass 55
- Fixing Rangefinder & Smartphone Residual Compass (azimuth) Deviation Errors – iPhone & Compass Deluxe

Leave a comment