
Row, row, row your boat gently up / down the stream???
Purpose: This blog post is created to help readers a) better understand electronic compass [smartphone or rangefinder] residual azimuth deviation errors b) quantify the errors, c) model the errors, d) compensate for [correct] the errors, and e) influence third-party app/hardware vendors to apply the correction method within the affected smartphone app/hardware. Basically, we need to know (accurately) whether to go up / down the stream (path) we are traveling on.
Goal: The goal of this blog post is to illustrate/demonstrate various approaches for collecting residual azimuth deviation (data) records necessary and sufficient for the determination of azimuth error correction parameters – using the TruPath Compass app on the Android phone.
Background:
This post demonstrates azimuth deviation data collection techniques available using the new Android / TruPath Compass app (prototype). These demonstrated deviation data collection techniques differ (significantly) from the data collection equipment/procedures used previously to a) demonstrate the existence [reality] of residual azimuth deviation errors and b) prove that residual azimuth deviation errors can be corrected effectively. Refer to the original post/page at http://www.tru-path.org and subsequent posts.
- For each demonstration, a reference direction was established based a) on a distant target location or b) the sun position [azimuth] – relative to the respective demonstration site’s geographic location on the date/time of the demonstration – to establish a correct, defendable, and independent reference direction.
- The Android/TruPath Compass app was set to indicate azimuths relative to True North.
- The Android phone (sensor[s]) was recalibrated prior to each demonstration.
- Only the “portrait” phone orientation was used during these demonstrations.
- Recall: Residual (after calibration) compass deviation error persists throughout the entire 360 degree range of measurement.
Highlights:
If the user wants/needs more accuracy, the user should employ “more accurate” tools and/or techniques during the data collection process – such as
- Use more accurate (external) GPS tools and techniques.
- Use a more accurate “surveyed” distant target (reference feature) location.
- Use a more accurate (steady) tripod rather than simple handheld data collection techniques.
TruPath Compass supports the analysis/determination of residual azimuth deviation error correction parameters for:
- Use of the TruPath Compass app on its own host smartphone.
- Use of third-party compass apps on the same host smartphone that is being used with the TruPath Compass app.
- Use of third-party compass apps on an external smartphone (other than that used to host TruPath Compass app) – that is, mount the external smartphone such that it is operating in parallel with the TruPath Compass host smartphone.
- Use of an external handheld laser rangefinder compass – that is, mount the external rangefinder such that it is operating in parallel with the TruPath Compass host smartphone.
- Use of an external electronic compass unit(s) – that is, mount the external electronic compass unit such that it is operating in parallel with the TruPath Compass host smartphone.
TruPath Compass can be used on both a) sunny days and b) cloudy days – different (situation based) approaches are demonstrated to determine the necessary/sufficient reference azimuth.
The “extra” time/effort necessary to correct residual azimuth deviation errors inherent in the host smartphone compass sensors amounts to about/less than 4 minutes of data collection time and some knowledge of the workings of the TruPath Compass app. It’s a very small price to pay of improved compass azimuth accuracy enhancements.
Demonstration Sites and Techniques
Referencing a Distant Target (feature) Location (CLOUDY Day)
The first demonstration site chosen was located in the parking lot of a local church across an active highway from a local community college. A high voltage electric power transmission line (and several electric power distribution lines) run parallel to the highway. Thus there exists multiple sources of magnetic/electromagnetic influence (interference) on the earth’s magnetic field in the immediate vicinity of the demonstration site.
In the following screenshot (image), the blue dot represents the first demonstration (data collection) site location; while the orange/red marker (upper right) provides the GPS location of the “distant” target – and thus, TruPath Compass can define the necessary reference direction (azimuth) between the demonstration site and the distant target.
PREVIEW: First Demonstration Site (distant target / observer location)
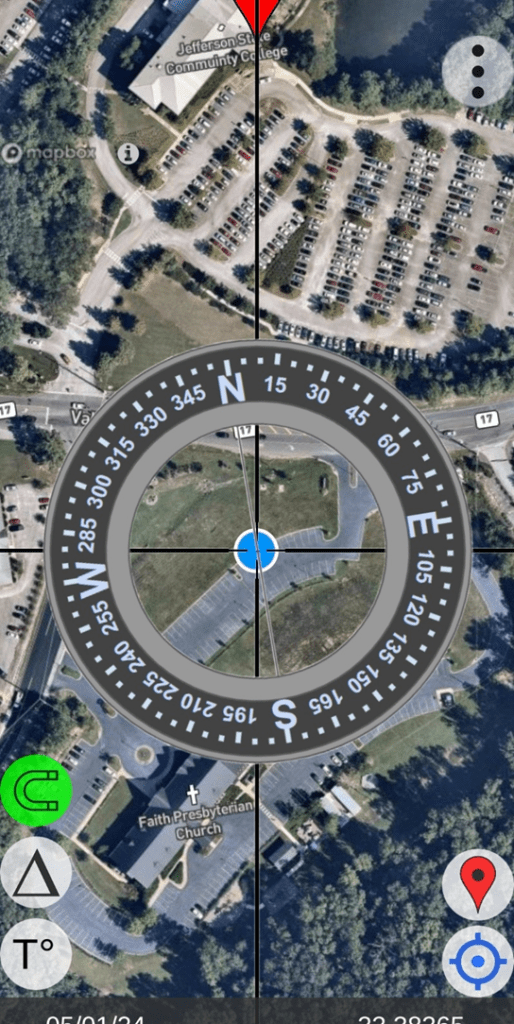
In order to collect the necessary/sufficient azimuth deviation data, the user needs to select a good observation site (blue dot) from which the distant target (orange/red marker) can be viewed.
TruPath Compass provides multiple ways for the user to obtain the GPS location of the distant target:
- First option: The user can a) drag/move the background map until the screen index lines (crosshairs/screen center) are directly over the intended distant target and b) then touch the orange/red smart marker button – lower right screen area – to place the marker. Subsequently, the user either accepts the location or edit/accepts [in the case of surveyed points] the GPS coordinates of the marked distant target.
- Second option: The user may elect to occupy the distant target location and use the phone’s GPS capabilities to locate the distant target coordinates and then “mark” the distant target location.
Occupy the (User-Chosen) Distant Target Location
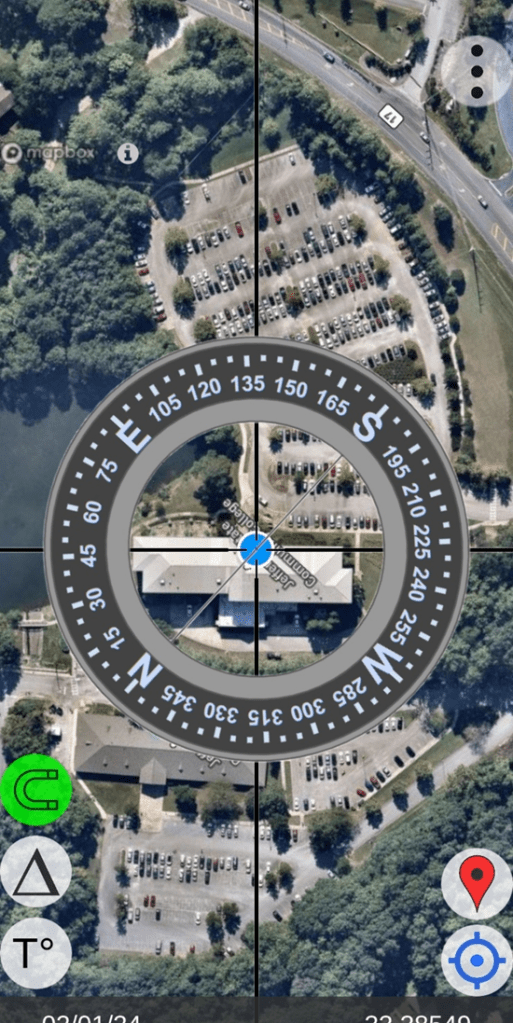
Note: The blue dot indicates the (occupied) GPS location of the distant target (feature).
Mark the Distant Target Location
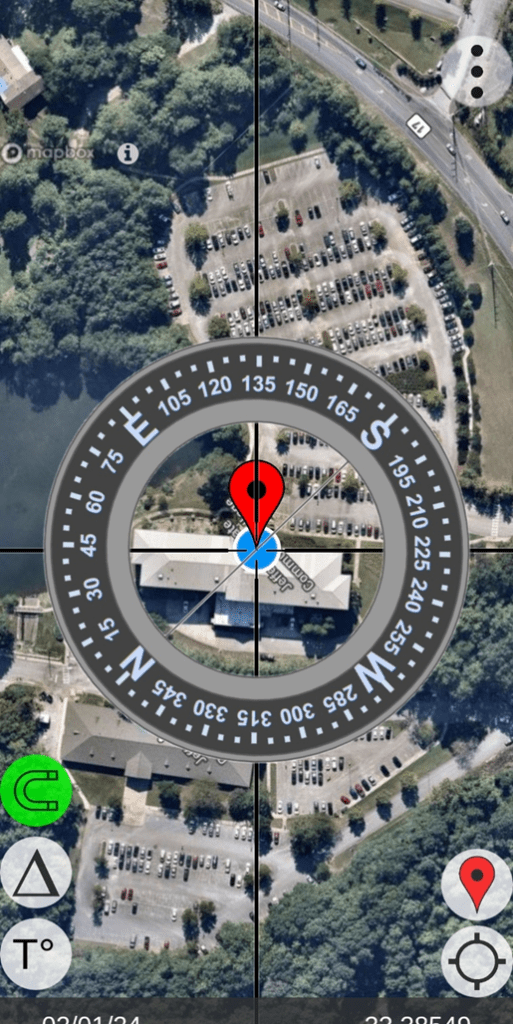
Note: Without changing location, the user can “mark” the location of the reference distant target.
Note: The geographic (GPS) coordinates of the distant target (feature) can be edited if survey techniques have been used to enhance coordinate accuracy.
- Distant Feature: (occupied and located using phone GPS with TruPath / Map buttons)
- Lat: 33.385492641166
- Long: -86.73335894163
Initiate Deviation Data Collection (occupy the demo site)
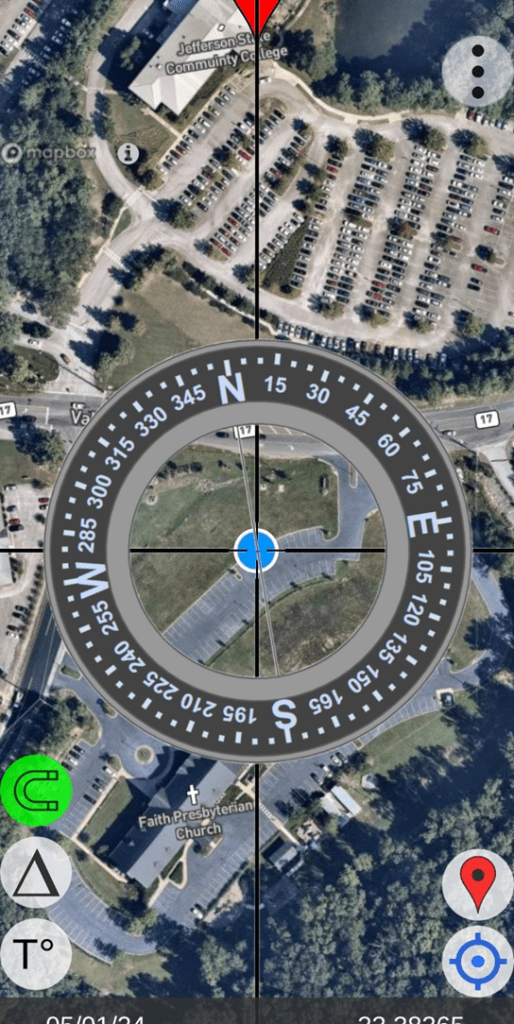
Note: The demo site (blue dot) is occupied – with a clear view of the distant target (orange/red marker).
- Observer Location (occupied and located using phone GPS)
- Lat: 33.38366417
- Long: -86.73371627
CHECK (option): Determine the reference azimuth from the observer location to the distant target location. (Reference: Internet – Azimuth Calculator)
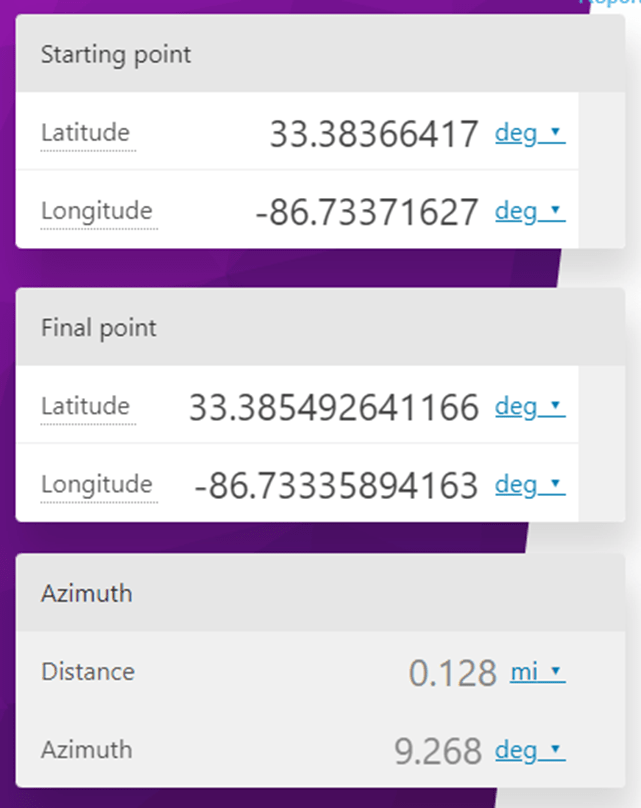
Now: Use the “Menu” button in the upper right corner of the compass/map screen to activate the “Deviation” function.
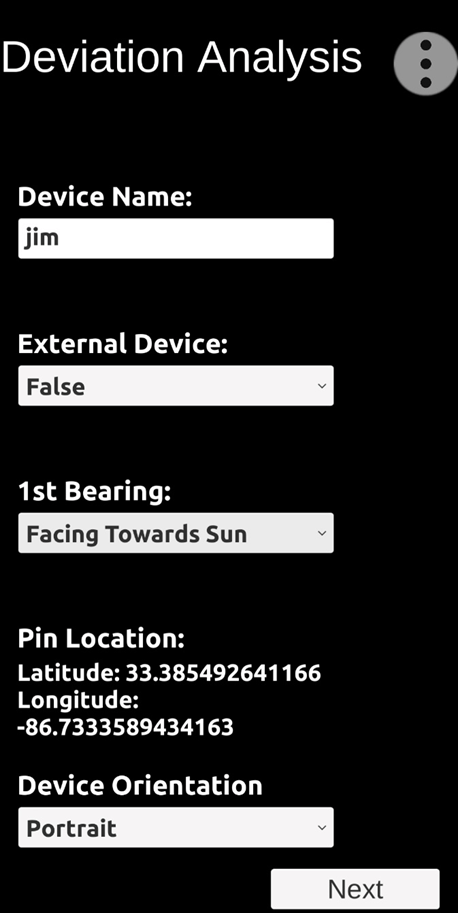
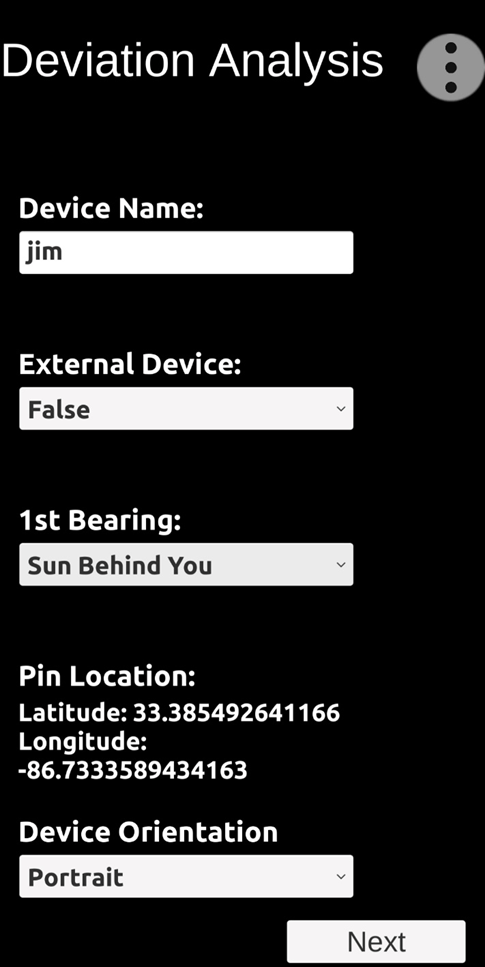
Deviation Data Collection (setup)
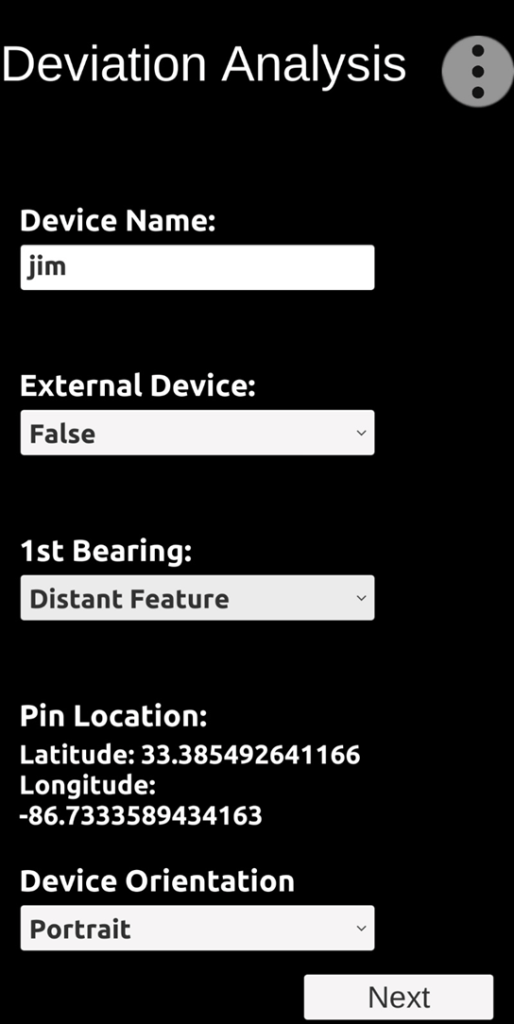
After setting up the deviation data collection parameters, click “Next” in preparation to collect the first deviation data record (sight on the distant target).
Note: “External Device = False” indicates that we are NOT assessing an external device such as a handheld laser rangefinder or a third-party compass app running on a second (external) smartphone.
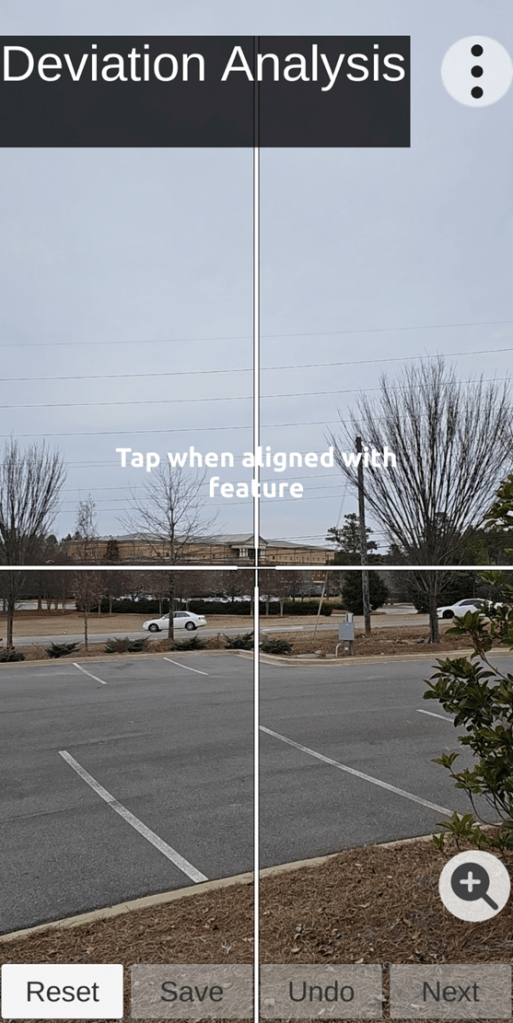
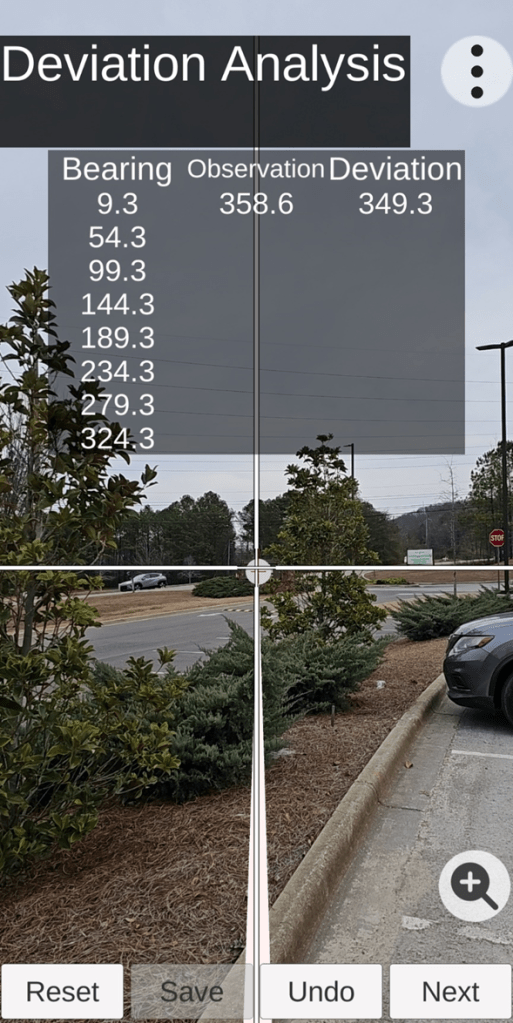
Begin Collecting Deviation Data (user action => tap screen)
Note: For this demonstration, the designated distant target feature is the highest point on the roof (center of building). When the distant target (feature) is centered on the screen, tap the screen to collect the first azimuth deviation reading – establish a reference azimuth.
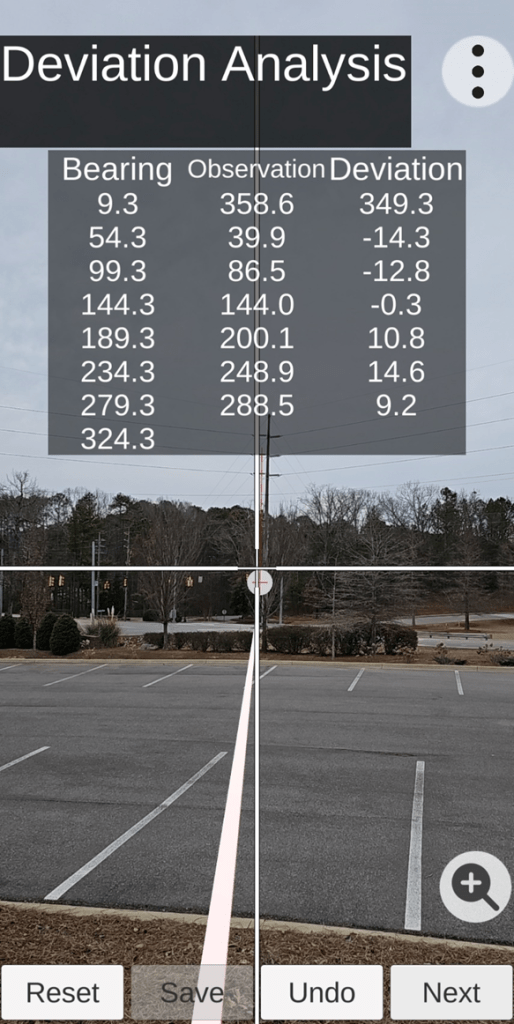
Deviation Data Collection Table (below – with first collected data row)
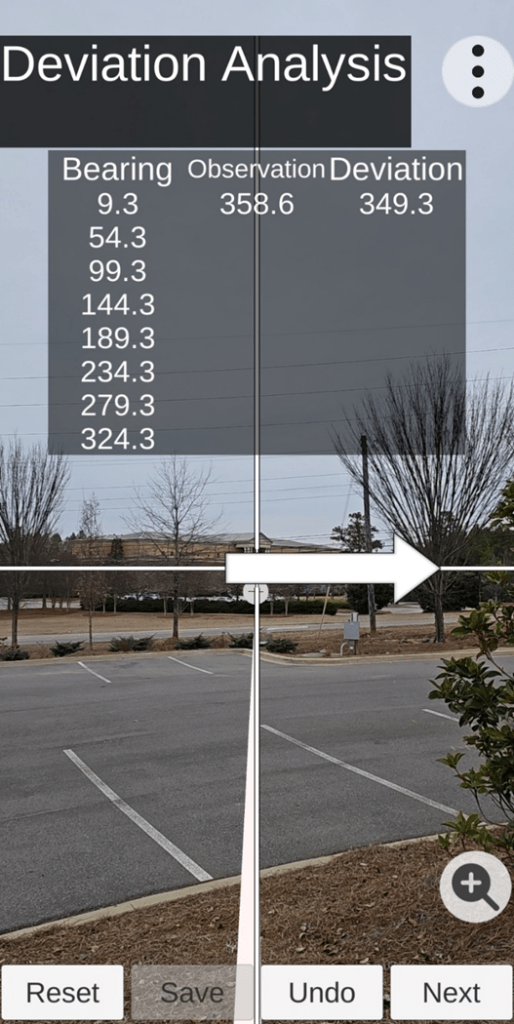
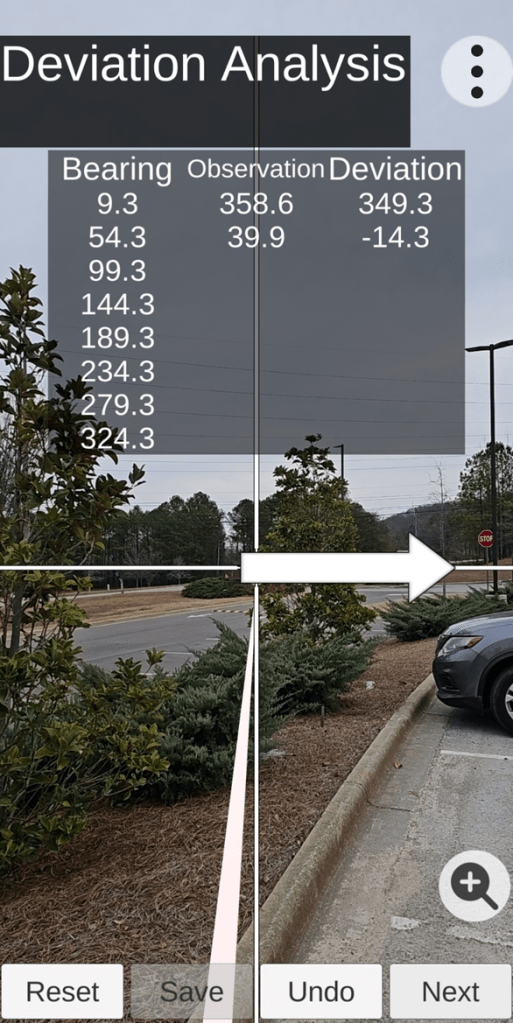
Follow the arrow to find the “next” designated target; then click the “Next” button to collect the next azimuth deviation reading. Azimuth deviation readings will need to be collected around a full 360 degree rotation. In this case, three azimuth deviation readings have already been collected.
Moving on to the next target.
Click “Next”
Move on to the next target.
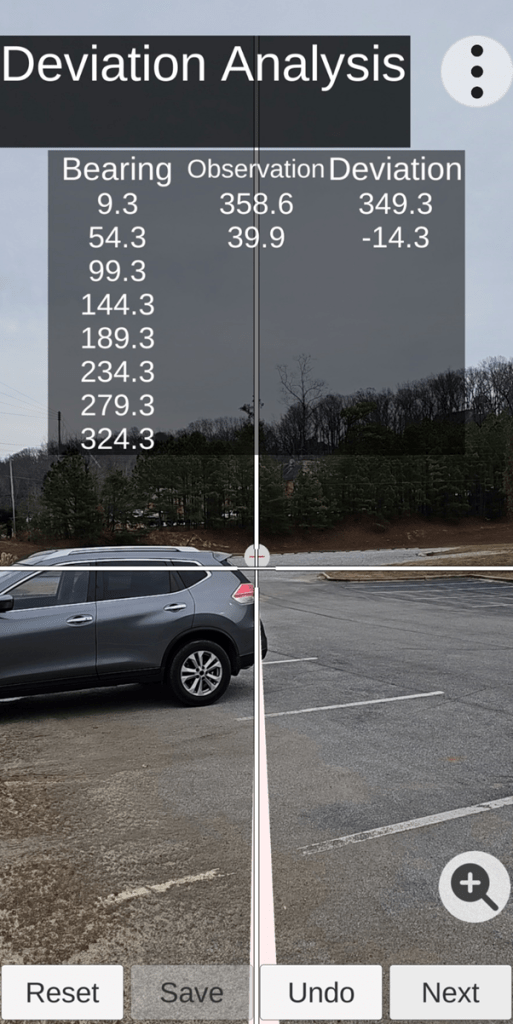
Click “Next”
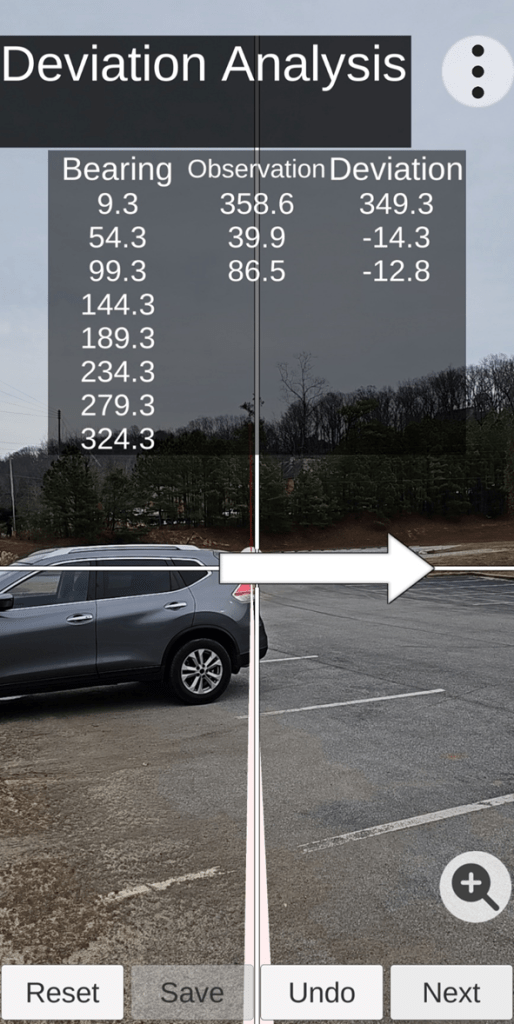
Move on to the next target.
Proceed (repeat the process) to complete the Deviation Data Table until all data rows are filled.
Click “Next” after centering crosshairs on the target symbol provided.
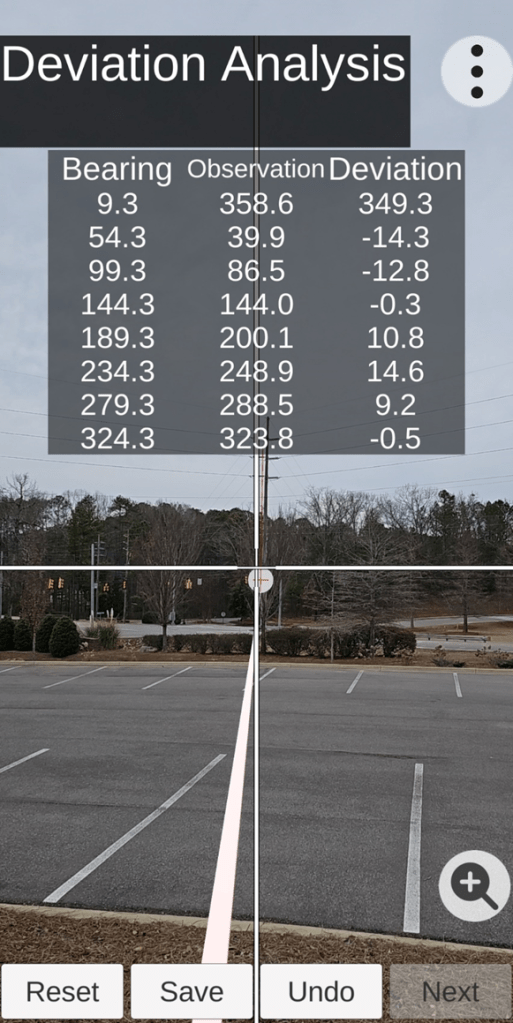
After the deviation data table is completely filled (eight azimuth deviation readings collected), click “Save”. The “Save” operation not only saves all the collected deviation data; but also, “Save” determines the residual azimuth deviation error correction parameters for subsequent use with the TruPath Compass app or some third-party compass app, laser rangefinder compass, or electronic compass unit – situation dependent. The entire data collection process should take less than four (4) minutes.
You are DONE! You now have a much more correct azimuth reading than you had before!
Referencing the Sun’s Azimuth (BRIGHT day)
The second demonstration site chosen was located in the parking lot of a Lowes hardware/lumber store. A high voltage electric power transmission line (and several electric power distribution lines) were in close proximity of the store. Thus there were multiple sources of magnetic/electromagnetic influence (interference) on the earth’s magnetic field in the immediate vicinity of the demonstration site.
In the following screenshots (images), the blue dot represents the second demonstration (data collection) site’s GPS location. This GPS location becomes the basis for the TruPath Compass app to define the necessary reference direction (azimuth) for a) collecting residual azimuth deviation error data and b) determining the necessary/sufficient error correction parameters.
Second Demonstration Site Location

Facing Toward Sun (first option) – (setup for deviation data collection)
When collecting azimuth deviation error data on a sunny day, the user needs to select a rather slender vertical object (in this case a light pole) and align his phone with the sun’s shadow of the object (Facing Towards Sun).
Facing Towards Sun (first azimuth deviation data collection operation)
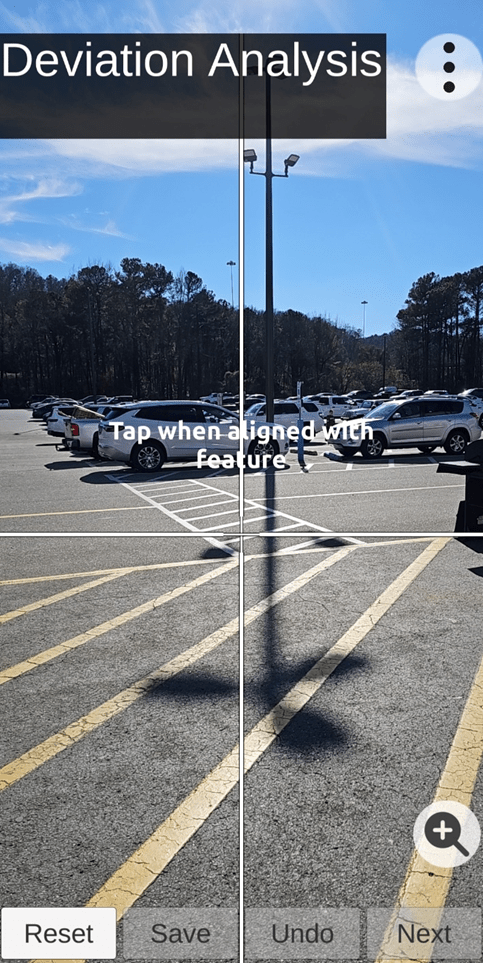
First Solar Option: With the sun in the background, the user will complete the alignment of the screen crosshairs (vertical) with the shadow of the vertical object and tap the screen to record the first azimuth deviation data record (sun’s azimuth – reference). Next, the user will proceed to collect the remaining seven (7) azimuth deviation data records – as described in the first demonstration’s text. It’s as simple as that! Data collection time should be about/less than 4 minutes – handheld operation.
You are DONE! You now have a much more correct azimuth reading than you had before!
The solar option is the easier, faster, more reliable, and more accurate method for collecting deviation (azimuth error) data.
If the user wants/needs more accuracy, the user should employ “more accurate” tools and/or techniques during the data collection process – such as:
- Use more accurate (external) GPS tools and techniques – BadElf (Surveyor)
- Use a more accurate (steady) tripod rather than simple handheld data collection techniques
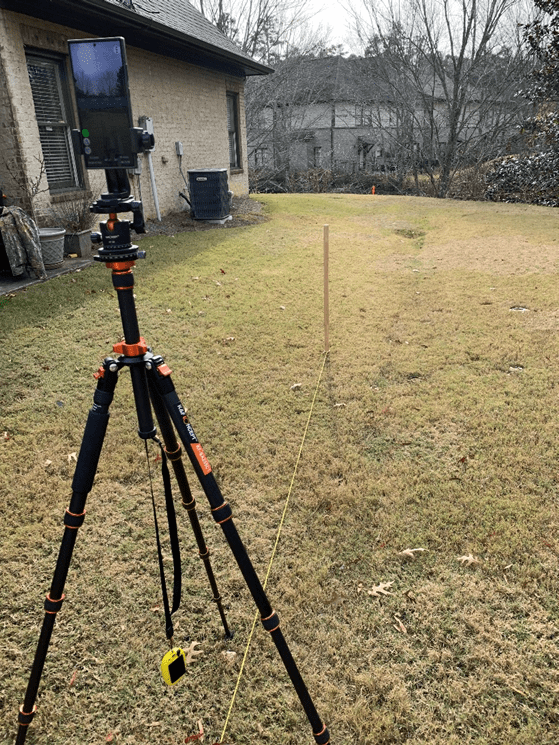
The following photo illustrates the use of a camera tripod (with azimuth ring), smartphone mount, external GPS unit, shadow stake (vertical), and a string to collect the azimuth deviation data (facing towards the sun). The first deviation record (sun’s azimuth – reference) is captured when the string bisects the shadow of the vertical stake.
Facing Away from Sun (second solar option) – (setup for deviation data collection)
Second Solar Option: When collecting azimuth deviation error data on a sunny day, the user may wish to select a rather slender vertical object (in this case a light pole) and align his phone (crosshairs) with the sun’s shadow of the object (with the sun behind the operator).
Facing Away from the Sun (first azimuth deviation data collection operation)

With the sun behind the operator, the operator will complete the alignment of the screen crosshairs (vertical) with the shadow of the vertical object (light pole) and tap the screen to record the first azimuth deviation data record (sun’s azimuth – reference). Next, the user will proceed to collect the remaining seven (7) azimuth deviation data records – as described in the first demonstration text. It’s as simple as that! Data collection time should be about/less than 4 minutes – handheld operation or tripod operation.
Demonstration Results
The purpose of these demonstrations was to illustrate the flexibility of the TruPath Compass app when collecting residual (after calibration) azimuth deviation (error) data necessary/sufficient for determining the azimuth deviation correction parameters. The methods demonstrated can be applied regardless of the type of electronic compass being used:
- The TruPath Compass app on its own host smartphone,
- Third-party compass apps on the same host smartphone that is being used with the TruPath Compass app (compass error correction parameters being provided by the TruPath Compass app),
- Third-party compass apps on an external smartphone (other than that used to host TruPath Compass) – that is, mount the external smartphone such that it is operating in parallel with the TruPath Compass host smartphone (compass error correction parameters being provided by the TruPath Compass app),
- External handheld laser rangefinder compass – that is, mount the external rangefinder such that it is operating in parallel with the TruPath Compass host smartphone (compass error correction parameters being provided by the TruPath Compass app), or
- External electronic compass unit(s) – that is, mount the external electronic compass unit such that it is operating in parallel with the TruPath Compass host smartphone (compass error correction parameters being provided by the TruPath Compass app).
Conclusions:
- The Android/TruPath Compass app is easy-to-use with either handheld or tripod-mounted data collection methods.
- The TruPath Compass app (prototype) requires about 4 minutes to collect the measured azimuth readings for each demonstration case – very efficient.
- The TruPath Compass app (prototype) can be effectively used in the handheld mode or mounted on a camera tripod.
- The TruPath Compass app (prototype) can be used to compensate residual (after calibration) azimuth deviation errors in a very effective manner – in a variety of operating circumstances.
- The TruPath Compass app (prototype) makes the smartphone “compass survey” method plausible.
- The TruPath Compass app (prototype) makes the smartphone/laser rangefinder solution of the remote target localization problem plausible.
- The TruPath Compass app will be capable of:
- Compensating residual (after calibration) azimuth deviation errors on the host smartphone for the TruPath Compass app.
- Determining the necessary/sufficient compensation parameters for any third-party smartphone compass app; and these compensation parameters will be made available for correcting the third-party compass app’s residual azimuth deviation errors.
- Determining the necessary/sufficient compensation parameters for any third-party rangefinder compass; and these compensation parameters will be made available for correcting the third-party rangefinder compass residual azimuth deviation errors.
- Determining the necessary/sufficient compensation parameters for any third-party electronic compass; and these compensation parameters will be made available for correcting the third-party electronic compass residual azimuth deviation errors.
Preview: In upcoming blog posts, we will use the Android/iPhone & TruPath Compass app to demonstrate/test effective correction of residual azimuth deviation errors in a variety of practical use situations. As with previous tests involving the Android/iPhone & TruPath Compass app, the same (demonstrated) methods will be used to collect, analyze, and present the results. Future blog posts are planned to deal with the Android/TruPath Compass app – a) compensating residual azimuth deviation errors in the middle of a crowded auto parking lot with lots of magnetic/electromagnetic influences and b) demonstrating a high degree of repeatability in collecting azimuth deviation error data.

Leave a comment